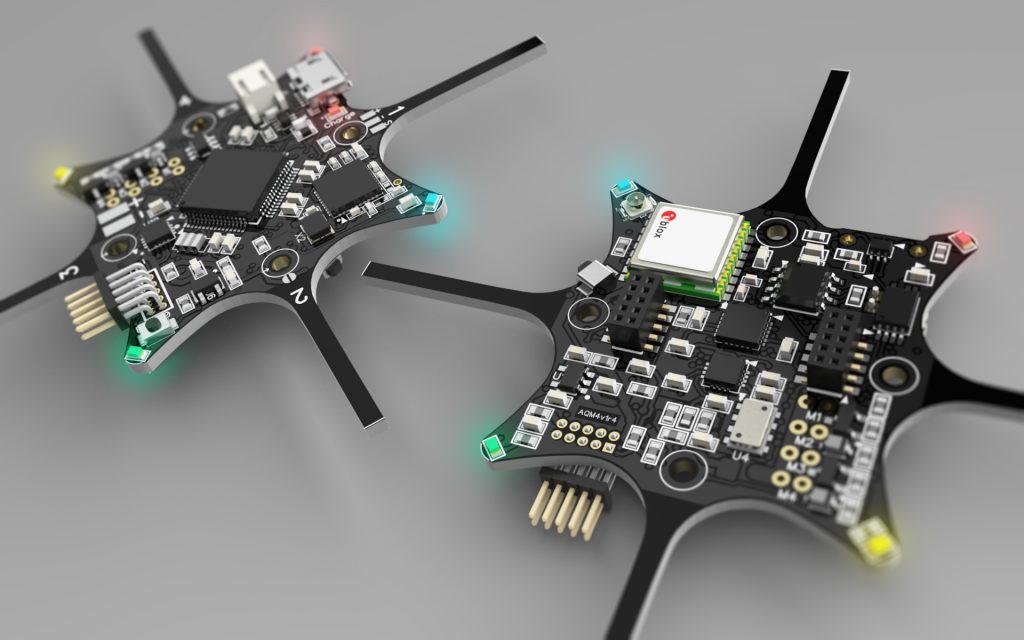
Flight Controller Project Goal Developing Flight Controller based on atmel SAMA5D36, ARM Cortex A5 using Free Rtos operation system. Implementing PWM for motor control, i2c for Gyroscope & accelerometer data etc. Controlling the drone using RF transmitter and receiver. The project included GPS driver for transmitting its location over RF. Client EPS tech Ltd. Your Message

 Email Us Email Us
Email Us Email Us